

轨道交通新技术
轨道交通智能运维
素材来源:《铁路通信信号工程技术》期刊联合铁路卫星与新技术应用专业委员会2025年特设“低空技术+轨道交通领域应用”专栏
轨道交通基础设施自主无人机智能巡检技术现状与发展趋势

秦 勇
俄罗斯工程院外籍院士,北京交通大学先进轨道交通自主运行全国重点实验室副主任、运营主动安全保障与风险防控铁路行业重点实验室主任,中国智能交通协会轨道智能运输系统专委会副主任兼秘书长
研究方向:智能感知与故障诊断、风险分析与应急指挥、图像智能分析、机器学习与深度学习
低空技术成绩:面向轨道交通基础设施全面/高效/准确感知获取、缺陷高精准辨识、运维管理智能化等需求,牵头研发并突破了轨道交通基础设施高效高安全无人机多专业综合巡检、高精准微小缺陷与潜在隐患识别、数智化状态修运维决策支持等关键技术,形成了轨道交通基础设施及环境安全状态无人机自主巡检与智能分析技术装备体系。
邮箱:yqin@bjtu.edu.cn

张紫城
北京交通大学交通运输学院
研究方向:铁路无人机智能巡检,计算机视觉
低空技术成绩:研究聚焦于高铁基础设施的无人机智能巡检与检测,涵盖基于无人机图像的关键构件缺陷识别、铁路场景SLAM三维重建、复杂开放环境下的无人机路径规划等技术,为实现空车地协同巡检模式提供技术支持。
邮箱:23120959@bjtu.edu.cn

杨怀志
京福铁路客运专线安徽有限责任公司副董事长、总经理
研究方向:铁路运输
低空技术成绩:主持设计了京沪高铁基础设施无人机智能巡检架构,研究面向高速铁路的多专业基础设施无人机自主巡检、高铁沿线典型设备无人机图像智能缺陷检测;牵头推动了京沪高铁无人机技术现场大规模实验与示范应用。
邮箱:gtyhz_007@126.com

孟凡腾
北京交通大学交通运输学院
研究方向:铁路安全检测,计算机视觉
低空技术成绩:研究聚焦高铁基础设施无人机智能巡检与检测,包括基于无人机图像的基础设施关键构件缺陷检测、铁路外部环境潜在隐患识别与风险分析、铁路复杂开放场景与拒止环境下的无人机高效巡检,深度参与国家项目、铁路无人机巡检系统落地应用与部署,为实现空车地协同巡检模式提供技术支持。
邮箱:ftmeng@bjtu.edu.cn

崔 京
北京交通大学交通运输学院
研究方向:铁路无人机智能巡检,机器学习与深度学习
低空技术成绩:研究主要聚焦于高铁桥梁基础设施的无人机智能巡检与检测,涵盖声屏障、表面螺栓等结构性与节点板表面锈蚀、桥墩台裂纹裂缝等多形态缺陷检测。通过无人机获取桥梁高精度图像,结合深度学习技术进行自动化缺陷识别,为实现空车地协同巡检模式提供技术支持。
邮箱:20114073@bjtu.edu.cn
仇宁海:博士,北京交通大学交通运输学院,研究方向:铁路数字孪生,无人机智能巡检。在低空领域方面,结合数字孪生与无人机智能巡检技术,研制基于数字孪生的智能巡检系统,具备飞行控制、智能分析及巡检管理等功能,已应用于多个项目,实现了基础设施全生命周期智能运维管理。邮箱:qiuninghai@bjtu.edu.cn。
孟 彤:硕士,北京交通大学交通运输学院,研究方向:铁路安全检测,计算机视觉。在低空领域方面,研究聚焦高铁基础设施无人机智能巡检与检测,提升巡检效率与智能化水平。内容包括无人机图像的构件缺陷检测、外部环境隐患识别与风险分析。参与京沪高铁智能巡检系统项目及相关技术应用与部署,为空车地协同巡检模式提供技术支持。邮箱:24120793@bjtu.edu.cn。
刘鹏帅:硕士,北京交通大学交通运输学院,研究方向:铁路安全检测,计算机视觉。在低空领域方面,研究聚焦基于无人机图像的高速铁路周边环境未知目标识别与风险等级评估,以及铁路钢桥涂层病害识别与评估;参与国家项目、铁路无人机巡检系统落地应用与部署,为空车地协同巡检模式提供技术支持。邮箱:24125769@bjtu.edu.cn。
汪 洋:本科,北京交通大学先进轨道交通自主运行全国重点实验室研究员,研究方向:铁路安全检测,智能故障诊断、自主安全保障。在低空领域方面,研究聚焦铁路安全检测,特别是高铁基础设施无人机智能巡检,通过结合激光雷达、AI图像识别、3DGIS及数字孪生技术提升巡检效率。深度参与国家项目,推动铁路无人机巡检系统应用与部署,为空车地协同巡检模式提供技术支撑。邮箱:yang_wang@bjtu.edu.cn。
王志鹏:博士,教授,北京交通大学交通运输学院,研究方向:智能感知与模式识别、智能故障诊断、预测与健康管理。在低空领域方面,主持和参与完成了京沪高铁济南西工务段、成都铁路局绵阳工务段、天津地铁5号线、青岛地铁等多项铁路无人机巡检系统的落地应用与部署,为构建空车地协同巡检模式提供了有力的技术支持。邮箱:zpwang@bjtu.edu.cn。
摘要:轨道交通既有基础设施服役时间增长,受环境和自然灾害影响性能劣化,病害频发,需先进巡检技术掌握其服役状态。现有机械与传感设备巡检存在频率低、覆盖范围有限、智能分析能力不足等问题,在桥梁、隧道口等区域巡检盲区多。无人机巡检具有高空作业、远距离覆盖、受地形与天窗限制小的优势。围绕轨道交通无人机智能巡检分析系统的 “边云协同” 分布式架构,探讨边缘端技术、云端技术及智能分析模型协同优化轨道基础设施巡检任务的方式,通过实际工程应用案例验证该技术的巡检价值,并基于无人机系统自主化等级,对未来无人机技术在轨道交通基础设施巡检中的潜在应用场景和研究方向进行展望。
关键词:轨道交通基础设施;自主无人机;智能巡检;边云协同
中图分类号:V279+.2;U216
文献标识码:A
文章编号:1673-4440(2025)02-0001-10
DOI:10.3969/j.issn.1673-4440.2025.02.001
基金项目:国家重点研发计划项目(2022YFB4300600);先进轨道交通自主运行全国重点实验室自主研究课题项目(RAO2023ZZ003);京沪高速铁路股份有限公司科技研究项目(京沪科研-2024-16)
引用格式:秦勇,张紫城,杨怀志,等.轨道交通基础设施自主无人机智能巡检技术现状与发展趋势[J].铁路通信信号工程技术,2025,22(2):1-10.
Qin Yong, Zhang Zicheng, Yang Huaizhi, et al. Current Status and Development Trends of Autonomous UAV Intelligent Inspection Technology for Railway Infrastructure[J]. Railway Signalling & Communication Engineering, 2025, 22(2): 1-10.
随着轨道交通里程不断增长,沿线基础设施巡检需求日益受到重视。传统巡检方式主要依赖人工徒步检查或借助轨道车完成定期巡检、故障反馈巡检及专项巡检。然而,这些方法存在效率低(例如沿线基础设施及其环境大范围巡查)、危险作业(例如桥梁高空巡检)、山区地形起伏大导致巡检困难等问题,难以满足轨道交通现代化运维需求。
近年来,随着传感器技术和机器视觉技术的快速发展,巡检方式逐步由人工向机械与传感器辅助模式转变。在线路巡检方面,各国研发了轨道综合检测车,如日本的East-i、美国的DOTX、以及中国的GJ-6型等检测车,通过激光摄像、数字图像处理等技术实现轨道几何参数和部件状态感知。然而,其在微小部件细节状态检测以及巡检覆盖感知方面仍存在不足。在供电设施巡检方面,4C与6C综合巡检车提升了接触网数据的采集效率,配合机器视觉能够实现部件定位与识别。但受限于样本稀缺性、天窗期约束及感知死角,导致检测对象覆盖率有限。在隧道巡检方面,移动式激光检查设备和地质雷达广泛应用于隧道衬砌表面与内部缺陷检测,结合传统图像处理技术与GPR信号分析,可识别衬砌空隙和缺陷。然而,这类方法对人员技能依赖较高,鲁棒性较低。深度学习技术的引入显著提升了目标检测和分割性能,但在复杂纹理背景下仍存在一定的误检和漏检问题。在桥梁巡检方面,机器人和机器狗等设备逐步替代人工完成高空桥梁以及内部箱梁的巡检数据采集,结合深度学习模型,实现了裂缝、锈蚀和螺栓松动等多任务检测。部分研究进一步扩展到关键部件的精细化分析,如螺栓锈蚀面积计算和裂缝宽度评估。然而,高空复杂环境与多任务模型的泛化能力仍需进一步优化,以满足实际巡检需求。
机械化与传感器技术显著提升了轨道交通巡检效率,减少了人工巡检的劳动强度,但在检测精度、微小部件感知、复杂场景适应性和实时性方面仍有不足。无人机巡检作为一种新兴手段,因其灵活机动、数据采集高效和具备无视地形的高空作业等优势,逐渐成为轨道交通领域的重要巡检方式。国外已广泛利用无人机技术进行轨道检测与维护,如日本的声纳成像、美国的桥梁检测和英国的隧道测绘。国内无人机巡检作业大多基于DJI商用无人机平台进行,巡检对象包括线路设备、桥隧设备、防洪地段、路外环境,以及接触网外观、接触网零部件状态、外部环境和弓网配合运行状态等。
为提升巡检的精准度和效率,蔡伯根等人研究了融合视觉和激光雷达的低空无人机多模态智能感知技术,并结合高精度卫星导航、惯性导航、UWB以及5G的多传感器精密定位技术,设计一种协同智能感知与精密定位的低空铁路无人机巡检方案。与此同时,赵强等人提出了结合3DGIS、北斗高清定位、AI图像识别、机载传感和数字孪生等技术的解决方案,用于实现智能巡检、安全管控、应急管理和远程调度等功能,从而进一步提升无人机在铁路巡检中的应用效果。
国内外相关研究表明,搭载高清相机、激光雷达、红外设备等的无人机,能够对桥梁裂缝、轨道几何参数、接触网组件状态等轨道细分领域进行隐患精准排查,显著提升巡检效率和安全性。
在“低空经济+”逐渐形成万亿级市场的背景下,无人机巡检为轨道交通基础设施巡检提供了全新的技术解决方案,显著提升了巡检效率和安全性,推动巡检模式逐步向 “全自主机巡”的方向发展。本文旨在探讨无人机巡检技术在轨道交通基础设施中的应用与前景,为未来智能巡检体系的构建提供理论支持和实践参考。
1 轨道交通无人机智能巡检边云协同分布框架
研究团队提出的轨道交通无人机智能巡检系统的边云协同分布框架主要由两个模块构成:边缘端自主捕获模块和云端智能分析模块。这两个模块的协同工作确保了对轨道交通设施的高效巡检和智能分析,如图1所示。
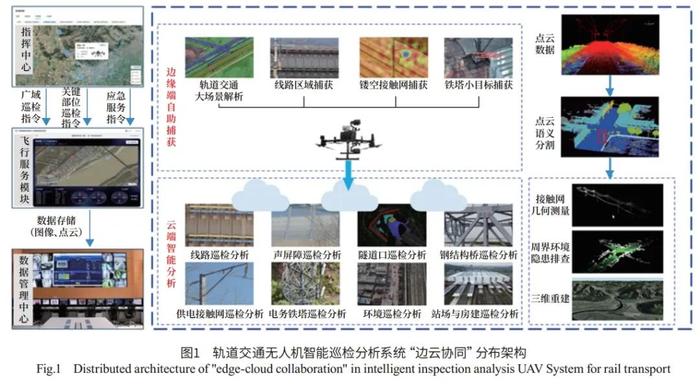
边缘端自主捕获模块负责数据采集,主要应用于轨道交通的不同设施巡检,如线路区域捕获、镂空接触网捕获和铁塔小目标捕获等。首先,指挥中心根据实际需求下发巡检指令,指令内容包括广域巡检指令、关键部位巡检指令或应急服务指令。接到指令后,飞行服务模块发出指令,巡检无人机接收指令自主飞行并对相应基础设施巡检。巡检过程中,无人机采集各种数据,包括图像和点云等。巡检结束后,数据被存储到数据管理中心并提供给云端智能分析。
云端智能分析模块的核心功能是对巡检数据进行深度分析,并生成巡检报告。例如,针对图像数据,云端分析模块根据作业任务判断巡检基础设施类型的同时向后端部署算法发起智能调度,缺陷与风险检测结果记录入库的同时进行现场位置溯源,同时自动生成巡检报告;针对点云数据,云端智能分析模块首先对其进行语义分割处理,识别和分类不同的结构和设施。接着,系统可以进行智能处理,如接触网的几何测量、周围环境隐患排查、三维重建等,从而帮助轨道交通部门对基础设施进行全面的智能化监控与评估。
通过边缘端自主捕获和云端智能分析的紧密协同,整个系统可实现对轨道交通设施的高效、精准巡检,提高巡检效率并降低人工成本,为轨道交通的安全运行提供强有力的技术支持。
1.1 轨道交通无人机智能巡检边缘端技术
随着无人机在轨道交通巡检中的广泛应用,如何避免无人机失控导致的对铁路安全威胁成为研究的关键。研究团队创新提出了一系列满足严苛安全要求的技术方案,填补了无人机在轨道交通场景下安全约束的空白,如图2所示。
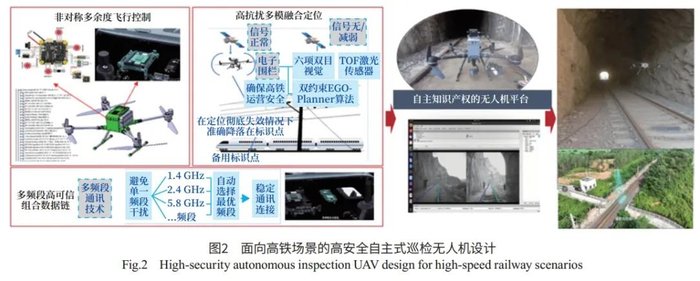
研究团队研发了非对称冗余飞行控制技术,通过冗余控制模块保障在系统故障时仍能维持飞行稳定性,显著提升了复杂环境下的飞行安全性。此外,采用高抗扰多模融合定位技术,结合卫星定位系统、惯性导航和视觉SLAM等,实现强干扰条件下的高精度定位,增强无人机在巡检任务中的自主飞行能力。
为确保数据传输稳定性,设计了多频段高可信组合数据链,通过诱捕防御和加密技术提升抗干扰能力,确保突发情况下数据可靠传输。这些技术使无人机的平均安全飞行时间得到显著提升,且在干扰环境下维持超20 m的安全距离,为巡检无人机的安全飞行提供了强有力的保障。
1.2 轨道交通无人机云端技术
轨道交通无人机云端技术,主要分为3部分,基于图像的基础设施智能分析、基于点云的基础设施智能分析以及智能巡检报表生成。
1.2.1 基于图像的基础设施智能分析
近年来,随着机器视觉的发展,基于卷积神经网络的图像智能分析方法逐渐受到广泛关注。铁路场景的图像智能分析研究也日益增加。针对铁路轨道的图像识别研究较早,为了提高轨道缺陷检测的精度,研究团队基于无人机图像提出了钢轨表面缺陷检测方法,采用局部类韦伯对比度(LWLC)增强算法与灰度拉伸最大熵(GSME)分割方法 ,该方法在钢轨表面缺陷的召回率方面分别达到了93.75%和94.26%,有效提升了检测效果 。此外,为了解决现有图像处理方法在轨道边缘模糊时的不足的问题,还提出了轨道边界引导网络(RBGNet),融合缺陷与边缘特征,设计创新的混合损失函数,并开发量化模型,成功应用于无人机轨道数据集,实验结果表明,该方法的F1-Score达到了96.7%,表现出较高的检测精度和鲁棒性,为该领域研究提供新思路与方法。针对轨道组件与钢轨表面同步检查需求,研究团队提出了全能YOLO(AOYOLO)框架,结合ConvNeXt骨干网络和新型U形显著物体分割分支。实验结果表明,AOYOLO框架在轨道表面缺陷检测中准确率达到了93.6%,有效提升了多任务轨道组件检查的性能。
针对接触网支撑装置紧固件缺陷检测,研究团队提出了一种结合级联YOLO和旋转RetinaNet的两阶段检测方法。通过实验验证,该方法在接触网紧固件缺陷检测中,召回率达到了88.1%,有效提升了高速接触网系统中紧固件的检测精度与速度。此外,研究团队提出了基于无监督学习的接触网零部件异常检测算法用于解决接触网零部件缺陷具有稀疏性、训练模型只能识别标注过的特定类型缺陷而无法检测到未知缺陷的问题。实验结果显示,该方法在检测零部件异常时,mAP达到了98.4%,显著提高了对未知缺陷的检测能力。同时,针对已知的接触网紧固件缺陷,研究团队提出了基于摧毁重建学习的零部件缺陷检测方法用于引导模型关注零部件细微缺陷局部区域,并实现开口销松动、断裂等细粒度缺陷的高精准判别。该方法在检测接触网紧固件细粒度缺陷(如开口销松动、断裂等)时,召回率达到了96.6%,证明了其在细微缺陷检测中的高精度和高效性。
在铁路声屏障和桥梁检测方面,研究团队提出了基于FCN的SCYNet模型,通过多尺度特征融合与数据增强方法,显著提升了检测效率与精度。实验结果显示其mAP达到92.2%,FPS为78.7,在声屏障检测中取得了优异的结果。另外,针对于桥梁无人机图像尺度变化大,检测目标小且密集,数据不平衡的问题,研究团队提出了ACSANet模型,结合自适应裁剪与浅层注意力网络,实验结果表明,ACSANet在铁路桥梁极小目标缺陷检测中的mAP达到了74.3%。
针对轨道交通外部环境的潜在安全隐患,研究团队开发了YOLARC框架,该框架通过多感受野的骨干网络和轻量化特征金字塔网络(FPN),显著提升了高速铁路的潜在安全隐患识别率,同时基于标准轨距映射判断风险物到轨道边缘的距离,进一步提高安全隐患的评估能力。相较于传统的人工视觉检查,YOLARC框架在保持较高准确率的情况下,FPS达到了35.90,显著提高了检测效率。同时,研究团队还提出UYOLO架构,通过创新的损失函数和风险等级评估模型, UYOLO架构在轨道安全隐患识别中的mAP达到了81.8%,召回率(Recall)为80.3%,实现了高检测率与高效性。为进一步提高对轨道及周边潜在安全隐患的解析能力,研究团队提出了混合学习架构YOLORS。实验结果表明,YOLORS在轨道安全隐患识别中的mACC达到了90.7%,mIoU为85.5%,在像素级解析与物体检测任务中表现优异,为铁路轨道安全隐患检测提供了有效手段。
总体而言,利用无人机图像进行轨道交通基础设施智能分析的研究已经覆盖轨道交通工务、电务和供电等多种巡检专业,技术的不断发展与创新正在为铁路安全保障提供强有力的支持。
1.2.2 基于点云的基础设施智能分析
点云数据因其包含的几何信息,在轨道交通基础设施的智能分析中具有独特优势。与图像数据相比,点云能够提供更精确的空间位置和物体形状,利用既有的拓扑关系可以有助于提升对沿线基础设施安全状态的感知能力。
针对轨道交通基础设施的细粒度点云语义分割,研究团队提出了SALAProNet框架,通过原型引导正则化和自注意局部聚合技术,解决了数据稀疏问题并增强了局部特征 。实验结果表明,SALAProNet在多种类型铁路数据集上的mIoU效果达到了75.2%,显著提升了点云数据处理的精度。
在接触网巡检和几何参数测量方面,研究团队提出了基于无人机激光雷达的巡检架构,通过点云分割和自适应提取方法,实现了接触线的精确测量。研究团队在中国最繁忙的高速铁路——京沪高铁上进行了测试,结果表明,测量误差控制在9 mm以内,为接触网维护提供了可靠支持。
总之,基于点云数据的分析技术在轨道交通基础设施检测中展现了明显优势,在提升检测精度和安全性方面具有重要意义。
1.2.3 智能巡检报表生成
利用团队研发并部署在云端的算法模型对无人机巡检数据进行分析后,智能生成巡检报表与维修工单,输出报告信息包括各项点缺陷情况,具体输出各项点缺陷类型、维修建议一一对应缺陷位置,原始高清图像信息、高清缺陷检测信息、巡检总结分析。缺陷位置信息按照运营公里标输出,巡检人员根据缺陷位置公里标信息可以迅速找到缺陷位置,同时高清图像与缺陷检测图像可以清晰反映缺陷现状。
2 工程应用案例
2.1 京沪高铁基础设施无人机巡检关键技术研究
2019~2021年,研究团队联合京沪高铁公司,研制出国内首套基于北斗+5G的全自动无人机智能巡检专用系统。该系统的建设提升了巡检作业效率,实现了全天候、大范围的高铁基础设施及外部环境隐患巡检。系统进行了304架次飞行试验,总飞行时长3 060 min,参与试验人员达272人次,涉及5种类型的无人机和7种载荷类型。
2.2 京沪高铁基础设施无人机智能巡检系统建设
高速铁路基础设施无人机巡检技术深化研究及应用课题,由研究团队承担,在京沪高铁上,率先完成了首个高铁巡检无人机系统的建设与验证。目前,该系统已在京沪高铁济南局管内进行试点推广,现场部署了多架固定式机巢和移动式设备,有效提升了巡检效率和精准度。
2.3 市域铁路基础设施无人机智能巡检系统研究与实施
市域铁路基础设施无人机智能巡检系统涵盖日常巡检和应急巡检两大场景应用,前者针对桥梁、高架外线、安全保护区等设施的管理需求,通过补充现有检测手段降低维护成本、提升效率;后者在突发事件中快速获取实时数据,为应急响应和决策提供支持。以浙江台州市地铁S1线为例,无人机应用于桥梁、声屏障及环境保护区等场景,全面采集与检测设施数据,线路共覆盖18个巡检项点,整体识别准确率超过93%,有效弥补了传统检测手段的不足。
2.4 铁路钢桁架桥无人机智能巡检
无人机智能巡检在铁路钢桁架桥的日常巡检与应急响应中展现出极大的优势。结合无人机自主导航、位置溯源、涂层病害语义分割以及病害面积评估等多项技术,实现了桥梁顶部、侧部的全面巡检以及底部关键区域巡检,涵盖节点板螺栓、桥墩、照明设施、支座及钢结构锈蚀等项点类型,整体识别准确率超90%。此外,在2023年山东地震后,研究团队研发的无人机系统迅速协助相关管理部门开展震后应急巡检,重点排查桥梁节点板螺栓、支座、桥底及上下弦检查车等关键设施,有效保障了列车的安全运营,充分验证了无人机技术在铁路钢桁架桥巡检中的高效性与可靠性。
2.5 无人机巡检场景对比分析
研究团队在铁路无人机巡检场景上涵盖了高速铁路和市域铁路,具体包括京沪高速铁路黄河大桥、西渴马隧道口和部分正线,以及台州地铁S1线(市域铁路),巡检场景涉及钢架桥、隧道口、接触网、声屏障、通信铁塔、环境、轨道与输电线路等,如表1所示。无人机飞行方式在不同场景有所区别:钢架桥巡检按照区域划分为上、中、下三层次巡检,为捕获螺栓等微小紧固件,无人机飞行速度为2~3 m/s;隧道口采用U形轨迹穿越上部山体,飞行速度为2~3 m/s;通信铁塔则采用螺旋上升的飞行方式,飞行速度为2~3 m/s;其他基础设施巡检场景需求大部分需要精细化数据采集,无人机飞行速度在2~3 m/s;外部环境需要大范围快速巡检,飞行速度为10~15 m/s。为了确保安全,高速铁路巡检时,无人机与轨道边缘横向距离最小间隔为50 m;市域铁路巡检时,则保持30 m以上间隔。与传统的人工巡检和机器化巡检相比,无人机巡检不仅能够在较短时间内完成任务,还能覆盖常规巡检难以监测的盲区(例如接触网顶部、钢桥顶部与底部等)。

以上展示了无人机智能巡检技术在轨道交通基础设施维护与应急响应中的广泛应用。通过结合先进的无人机技术、图像识别技术和大数据分析,系统能够实现高效、精确的巡检任务,正持续扩大应用规模并推广至重载铁路、市域铁路、城市轨道交通等其他交通方式,形成了基于空基的轨道交通关键基础设施状态运维新制式。
3 未来发展方向展望
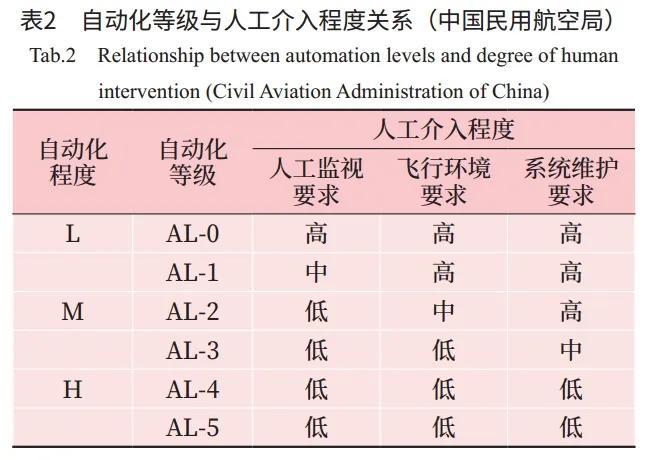
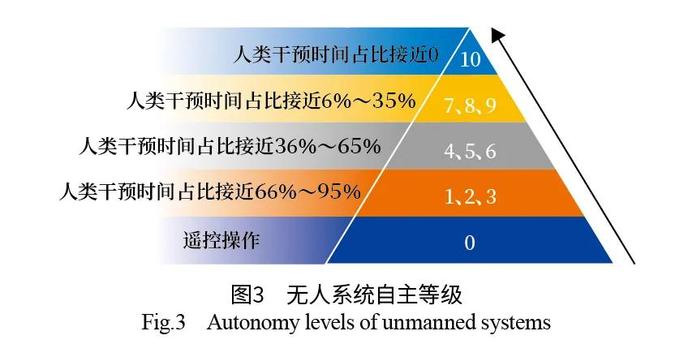
目前,中国民用航空局标准将民用无人驾驶航空器系统分布式操作运行等级划分为AL-0至AL-5,如表2所示。美国国家标准与技术研究院(NIST)定义了无人系统自主等级中人工介入时间占比,如图3所示。依据现行标准,国内轨道交通基础设施无人机巡检自主等级中人类干预时间占比约为36%~65%,处于AL-3自动化等级。
当前轨道交通基础设施无人机巡检自动化程度有待提升,利用无人机对基础设施巡检仍大量依赖人工干预进行精细化图像数据采集,在无卫星信号等拒止环境下的基础设施巡检能力不足。此外,利用无人机搭载采集载荷外的其他载荷进行高空作业控制、基于无人机多源巡检数据融合分析等仍有待深入研究。未来轨道交通基础设施无人机巡检将朝着更高自主等级方向发展,可能包括如下方向。
3.1 复杂开放空间下的无人机自主式导航巡检
针对复杂开放空间中轨道交通基础设施的精细化巡检需求,无人机基于基础设施结构特征构建自主式导航路径。通过拓扑路径搜索、轨迹优化和风险感知轨迹细化等关键技术,生成安全可靠的航点与航线,同时结合机器视觉,自主捕获基础设施关键结构。该技术现阶段为AL-3阶段,正逐步向AL-2或更高自动化等级迈进。
3.2 拒止环境下的无人机全要素感知与自主探索
在轨道交通沿线箱梁、隧道、钢架桥底部等无卫星信号拒止环境中,传统巡检面临电磁干扰、导航困难等挑战。无人机搭载多传感器,通过SLAM技术构建受限空间底图,并在巡检阶段实时配准底图数据,同时设置经停巡检点位,实现高效自主巡检。该技术目前主要为AL-2水平,进一步提升自主性有助于覆盖更复杂的受限空间场景。
3.3 特殊场景下的无人机高精度监测
面对老旧桥梁安全检测或隧道外危岩位移监测等特殊任务,无人机通过对附着标记物监测的方式,实现固定目标高精度感知。搭载可见光相机,结合平衡补偿和摩尔采样等技术,无人机精确测量对象的亚像素级变化,同时克服因飞行抖动导致的数据偏差。目前技术水平接近AL-3,未来将向AL-2或更高自动化等级发展,以支持更高精度的动态监测任务。
3.4 特种任务下的无人机高精准控制
针对轨道交通高空基础设施构件更换、异物处理等高风险特种任务,无人机可搭载多自由度机械臂,通过视觉伺服和力反馈技术在精确抵达作业点位后执行系列动作。任务执行基于能量损耗和效率的综合优化,无人机搭载的机械臂可实现异物抓取、构件替换等操作。当前技术接近AL-3,进一步提升有望进入AL-2阶段,实现更高精度控制和任务可靠性。
3.5 高安全无人机导航抗欺骗
为应对轨道交通无人机巡检期间的恶意信号欺骗风险,建立信号反欺骗系统,通过分析无人机接收的卫星定位信号特征,识别并预警恶意欺骗。依托导航欺骗防护设备及无人机防欺骗模块部署保证巡检线路或区域仅有授权的无人机作业,保证巡检高安全高可靠。
3.6 基于跨模态巡检数据融合分析的及时风险预报警
为实现多维度轨道交通隐患评估与风险预警,无人机通过巡检多模态数据融合构建综合判断模型,例如沿线危树、异常堆载识别与减载分析。结合边坡点云和可见光影像数据,无人机完成多任务处理,包括定位、分割与异常检测等。将跨模态算法部署在机载端,实时分析处理巡检数据,并通过专用通信链路进行风险预警,为调度中心和行车司机提供决策支持,以实现更智能化的巡检与及时风险处置。
4 结论
随着轨道交通基础设施巡检任务的复杂性和安全性要求不断提高,传统的人工巡检方式已经无法满足高效和精准的需求。自主无人机智能巡检技术,凭借其高适应性、灵活性以及实时数据采集能力,已成为提升巡检效率和保障安全的有效手段。本文详细探讨了边缘端与云端技术的结合,以及智能分析模型在轨道交通巡检中的应用。研究表明,无人机智能巡检能够显著提高轨道交通设施巡检的自动化水平,并且在实际应用中已取得了显著的成果。未来,随着无人机技术的不断发展和成熟,轨道交通无人机巡检将会迎来更广泛的应用。自主无人机将从单一的检测工具逐步向智能决策支持系统发展,进一步提升轨道交通巡检的精度和效率,推动轨道交通行业向更高效、更安全的方向发展。
素材来源:《铁路通信信号工程技术》期刊

财经自媒体联盟













































 第一财经日报
第一财经日报  每日经济新闻
每日经济新闻  贝壳财经视频
贝壳财经视频  尺度商业
尺度商业  财联社APP
财联社APP  量子位
量子位  财经网
财经网  华商韬略
华商韬略 
4000520066 欢迎批评指正
All Rights Reserved 新浪公司 版权所有
