
来源:hawk26讲武堂

本期信熹研究将围绕智能枪瞄行业介绍行业概况、市场规模、产业链情况,分析竞争格局、技术壁垒及技术发展方向。由于篇幅较长,将分为上下两篇发送。
三、产业链
智能枪瞄产业链如图13所示,主要为上游的零部件,中游的枪瞄制造与组装,以及下游的应用。
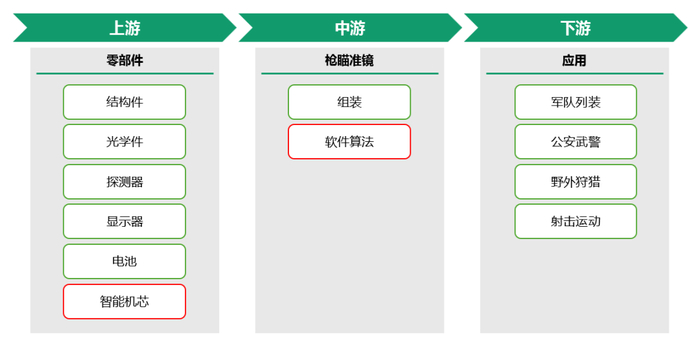 图13 | 智能枪瞄产业链
图13 | 智能枪瞄产业链(来源:信熹资本整理)
上游零部件包含结构件、光学件、探测器、显示器、电池和智能机芯。其中结构件如金属外壳、支架和调节机构,是用来确保系统的耐用性和精确度。光学件主要为镜片和棱镜,是高精度光学瞄准系统的基础。探测器主要为CMOS传感器或热红外成像传感器,用于捕捉图像。显示器主要为高分辨率LCD或OLED,用于实时显示瞄准信息、成像画面和其他战术数据。电池需要提供至少6个小时的长时间续航能力。智能机芯主要包含高性能嵌入式处理器、高速存储器、无线通信模组等,用于支持图像处理、目标识别与跟踪、弹道计算和用户界面显示。
中游主要包含枪瞄产品的组装以及软件算法的集成。其中组装主要是生产光学组件、电子模块,并进行最终的系统组装和测试,确保每个组件和整个系统符合军用或专业标准,具有高可靠性和耐用性。软件算法主要是在边缘端算力芯片上实现图像处理、多目标识别与跟踪、弹道计算以及用户界面显示。
下游的应用场景主要包含军队列装、公安武警、野外狩猎和射击运动。其中军队列装和公安武警的销售途径通常为政府招标采购,而野外狩猎和射击运动的销售途径主要为零售商店和在线平台。
产业链图13中的绿色框部分受益于传统光学枪瞄和数码枪瞄,已经有非常成熟的供应商,主要企业见图10。红色框的智能机芯和软件算法是智能枪瞄的新需求,也是技术壁垒所在。
四、竞争分析
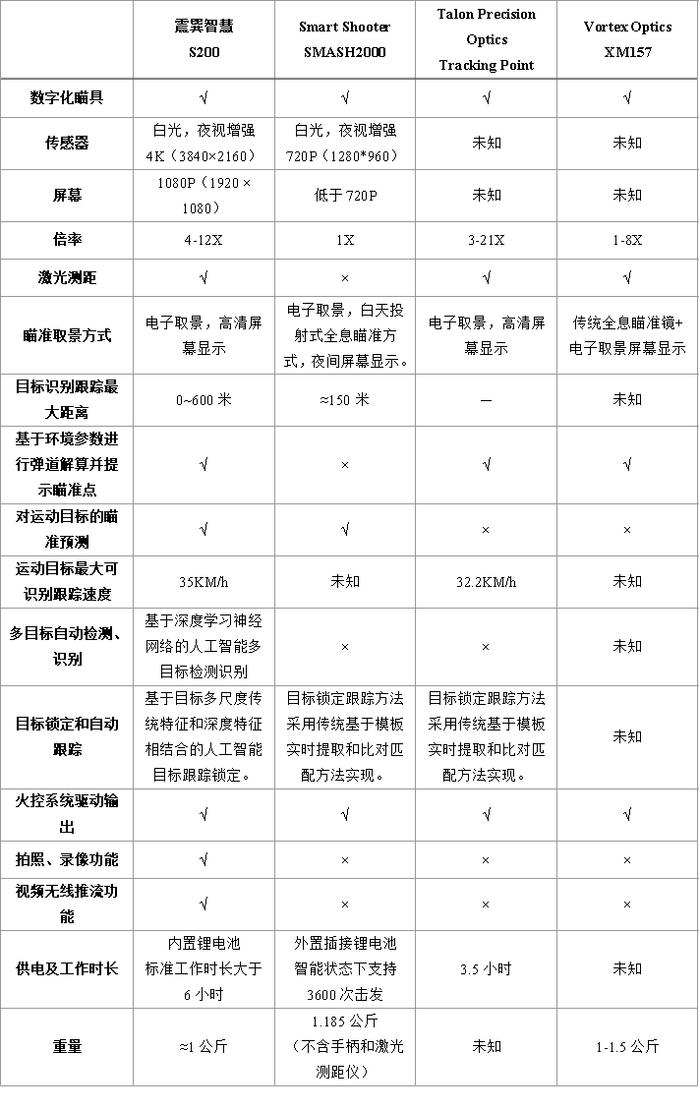
表2选取了国内外几家智能枪瞄企业,对其产品参数进行了对比分析。Smart Shooter、Talon Precision Optics和Vortex Optics已经在智能枪瞄领域发展多年,有产品量产,其中Smart Shooter的智能枪瞄最受各国关注。震巽智慧的烛龙S200产品相比于其他产品,优势主要在于有弹道解算和目标运动预测、多目标的识别与跟踪等功能。
表2 | 智能枪瞄产品的参数对比
(来源:信熹资本整理)
五、技术壁垒
智能枪瞄产品的开发需要具备“军工+人工智能”双重背景的人才团队,因为一方面需要深刻理解军工产品的使用环境和用户需求,并且满足军工产品质量要求;另一方面需要算法团队具备较高的算法理论素养,并且对工程实践具有丰富的经验和深度的理解,这样才可以将最新的算法理念与产品开发的工程实际相结合,从而在低功耗、小体积、严苛军事应用场景等条件下,实现复杂人工智能算法的边缘端工程化布置,满足武器系统的快速响应和操控的高实时性要求。
缺少嵌入式人工智能算法工程化落地的经验,正是军工科研院所的项目制样品无法产品化落地的原因。尤其在超低功耗嵌入式硬件平台部署方面,需要通过在电源管理、芯片NPU/CPU多内核调度、芯片低功耗等方面采用与人工智能算法技术密切耦合的解决方案,突破人工智能嵌入式产品在硬件算力、能耗等方面的瓶颈。
对于智能枪瞄,其中硬件部分已经有非常成熟的产业链,技术壁垒主要在嵌入式算法层面,包括目标识别与跟踪、以及精确弹道解算。
5.1 | 嵌入式目标识别与跟踪算法
5.1.1 | 算法要求
嵌入式目标识别与跟踪算法的难点在于,应用场景对于算法性能、算法实时性、算法优化、算法鲁棒性同时具有较高的要求。
算法性能:要求目标框尽可能贴合目标外部轮廓,目标不动情况下,目标框的中心位置和长宽尽可能保持不变;
算法实时性:对4K分辨率的高清图像数据,处理速度不低于30赫兹;
算法优化:使用移动端低算力计算平台,实际可用算力一般低于4TOPS,在保障实时性的基础上,同时实现对不少于5个目标的目标识别、目标跟踪、轨迹预测、传感器运动解耦等功能;
算法鲁棒性:在不同场景如城市道路、草地、森林、室内等环境下识别性能保持稳定,在不同天时如多云、晴朗、小雨等光照条件下识别性能保持稳定,在不同距离如50米、100米、200米、300米等距离条件下识别性能保持稳定,对不同类型目标如行人、靶标、无人机等均可实现稳定识别。
5.1.2 | 视觉目标检术的发展脉络测技
视觉目标检测是计算机视觉的经典任务,旨在定位图像中存在物体的位置并识别物体的具体类别。目标检测是许多计算机视觉任务及相关应用的基础与前提,直接决定相关视觉任务及应用的性能好坏。因此,视觉目标检测技术受到广大学术界、工业界等各领域,乃至国家和政府的广泛关注。在学术界,目标检测一直是各大计算机视觉会议及期刊的研究热点之一,每年有大量的目标检测相关论文发表。
根据谷歌学术显示,研究人员近10年来在目标检测方面发表论文15000余篇。在工业界,国内外科技巨头(如谷歌、脸书、华为和百度等)、初创公司(如商汤、旷视等)纷纷在目标检测相关领域投入大量人力财力。与此同时,目标检测技术是新一代人工智能的重要先进关键技术,世界各国竞相角逐。
如图14所示,在过去的几十年中,目标检测经历了基于手工设计特征的方法到基于深度特征的方法等不同发展阶段。早期,目标检测方法通常采用手工设计特征和浅层分类器的技术路线,例如支持向量机(support vector machines, SVM)和AdaBoost等。涌现了包括Haar特征(Viola and Jones, 2004)、方向梯度直方图(histograms of oriented gradients, HOG)特征(Dalal and Triggs, 2005)等一系列经典的目标检测特征描述子。
2012年以后,深度学习技术取得了迅速的发展,并凭借丰富的特征表示能力和大规模数据集及评价标准构建与分布。基于上述技术、算法和数据的铺垫,视觉目标检测在准确度与效率等方面取得了显著的提升,先后涌现出区域卷积神经网络 (region-based convolutional neural network, R-CNN(Girshick 等,2014)、SSD(single shot detector)(Liu 等,2016)、YOLO(you only look once) (Redmon 等,2016)、DETR(detection transformer)(Carion 等,2020)等一系列经典的研究工作。相比于传统手工设计特征的方法基于深度学习的方法避免了烦琐的手工设计过程,能够自动学习更具有区分力的深度特征。与此同时基于深度学习的方法将特征提取和分类器学习统一在一个框架中,能够进行端到端的学习。
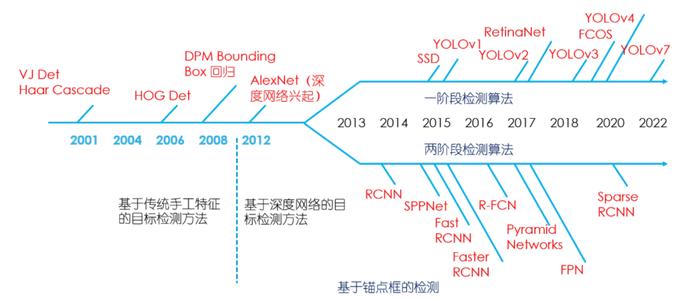
图14 | 视觉目标检测技术国内外进展
(来源:网络)
目标检测算法根据检测思想的不同通常可以分为两大类别:两阶段(two-stage)检测和一阶段(one-stage)检测。
两阶段检测算法基于提议的候选框,是一个“由粗到细”的过程。首先产生区域候选框,其次提取每个候选框的特征,最后产生位置框并预测对应的类别,特点是精度高但速度慢。最早期的R-CNN算法利用“选择性搜索”方法产生候选框,卷积神经网络提取特征、支持向量机分类器进行分类和预测。虽然R-CNN算法具有一定的开创性,但生成的候选框大量重叠,存在计算几余的问题。
2014年提出的SPPNet算法利用空间金字塔池化层对不同尺度的特征图进行池化并生成固定长度的特征表示,减少反复缩放图像对检测结果造成的影响。然而,SPPNet的缺点是:模型的训练仍然是分多步的;SPPNet很难对SPP层之前的网络进行参数微调,导致效率降低。2015年提出的FastR-CNN算法,对R-CNN与SPPNet算法做出进一步改进,提出感兴趣区域池化层(ROI pooling),使得检测的速度和精度大大提升。随后又出现的Faster R-CNN算法,实现了端到端地训练,用RPN网络代替选择性搜索,大大减少了训练和测试的时间。
一阶段检测算法基于边界的回归,是一个“一步到位”的过程。一阶段检测网络在产生候选框的同时进行分类和边界框回归,特点是速度快但精度稍逊。2015年YOLO算法提出,该算法将图像分割成S×S个网格,基于每个网格对应的包围框直接预测类别概率和回归位置信息。随后有出现了SSD算法,该算法借鉴YOLO算法的思想,并利用多尺度特征图进行预测。
两阶段检测算法,因为遍历检测,滑动框架需要大量计算,因此使用候选框架,首先要定位感兴趣的区域,然后检测每个候选区域,准确率较高,但计算量仍较大,难以实现实时检测。
考虑到两阶段检测的实用性,单阶段检测算法不需要提取候选区域,而是对每个feature map进行回归预测,大大降低了网络算法的时间复杂度。近年来单级检测算法在保持较高检测速度的同时,其准确率已经接近两级检测算法,使得其发展受到了越来越多的人的关注。
5.1.3 | 算法对比与优选
目标识别算法分为传统方法和基于深度神经网络的方法,传统方法一般包括以浅层分类器为代表的方法,如SVM支持向量机、BOOST级联分类器等,以特征为代表的方法,如直方图、模板匹配、SIFT、SURF等。基于深度神经网络的方法在准确度与效率等方面可以有显著的提升。
基于深度神经网络的方法,又可以分为基于卷积神经网络CNN的方法、基于自注意力神经网络transformer的方法。其中,基于transformer的方法提出时间较晚,模型较新,性能相对较好,但移动端计算平台如芯片,对其硬件加速支持仍十分有限,因此嵌入式目标识别方法以基于卷积神经网络CNN的方法为主。
基于卷积神经网络CNN的方法,按输出结果的数据组织形式,又可分为框识别和语义分割两类,其中框识别的方法指,输出数据为包含目标完整区域的矩形框,语义分割的方法指,对图像中所有像素进行判断,判断其是否属于特定类型的目标。由于语义分割算法复杂度相对较高,在移动端计算平台如芯片、FPGA上运行,很难满足实时性要求,因此嵌入式目标识别方法以框识别为主。
基于卷积神经网络的框识别算法,按实现流程又可分为one-stage方法和two-stage方法,two-stage方法的检测准确率高、位置信息更加精确,one-stage方法的推理速度快。由于智能枪瞄产品应用场景具有实时性要求高、应用于移动端计算平台的特点,因此优先选择one-stage方法。
5.2 | 适配各类枪械和弹药的弹道解算算法
弹道解算功能是枪械瞄准系统乃至火控系统中最重要的功能之一。它的核心功能是根据枪械、弹药类型,结合环境参数、目标距离角度等射击参数,综合计算出实际的弹着点,并以弹着点更新替代瞄准分划(十字)来引导射手进行射击。
基于子弹动力学及运动学的实时弹道解算程序和基于精确射表的弹道解算程序是现代弹道解算的两种主要方法,各有其优缺点。前者利用详细的物理模型和非线性微分方程,考虑空气阻力、旋转稳定性和重力等因素,提供高精度的弹道预测,适用于需要实时响应的军事应用和高级狩猎。然而,这种方法计算复杂,需高性能计算能力。后者则通过预先生成的射表数据进行查表和插值计算,速度快、实现容易,适合基础训练和资源受限环境。虽然精度依赖射表数据且适应性较差,但其简单性和实时性强的优势在一般射击训练和狩猎中尤为显著。综合来看,基于子弹动力学及运动学的实时弹道解算程序在高精度需求和动态环境下表现突出,而基于精确射表的弹道解算程序在计算资源有限的条件下提供了一种高效可行的解决方案。
由于弹道解算功能对于精确射击带来的巨大提升,它成为优秀瞄具厂商竞相开发的功能模块。但由于它较高的算法复杂度和系统集成方案(需要与瞄具的校准、传感器系统、射击提示及界面操作等功能紧密结合),目前仅部分国外高端品牌的旗舰款数码瞄具拥有该功能,如Vortex公司的XM157、施华洛世奇的DS等。
六、技术发展方向
智能枪瞄是智能火控系统在单兵武器上的应用,事实上为了适应复杂多变的战场环境,车载武器、机载武器、舰载武器、无人机、无人狗的火控系统等均在向智能化发展。也就是可以自主完成态势感知、敌我识别、信息共享、自主诊断、辅助决策、任务链动态构架等功能,具有良好的人机交互性的全天候、自主性,在规定时间内完成作战任务的同时极大减轻乘员负担的智能化火控系统。这些领域的智能火控系统使用的关键技术是相同的,需要不断提高性能和实现突破的主要关键技术有:
6.1 | 威胁评估与态势感知
态势估计是对战场战斗力量分配情况做出评价的过程。它通过综合敌我双方兵力、部署及地理、气象等环境因素,分析并确定事件发生的深层次原因,将得到的双方兵力结构、使用特点等直观呈现在战场环境中,形成战场综合态势图。
威胁估计是关于敌方兵力对我方威胁程度的估计。它根据战场敌我双方的态势,综合敌方的杀伤力、机动能力、运动模式及行为企图,得到敌方的战术含义,推断敌方对我方的威胁程度,为我方进一步的决策和指挥提供支持。
目前在态势感知和威胁评估方面的方法主要有贝叶斯网络法、多属性决策法、运用D-S证据理论方法、Lachester方程、案例推理、时空推理等。
6.2 | 目标识别、跟踪与智能图像处理
目标识别是指通过成像传感器获取目标图像信息,通过对图像特征的提取与识别确认目标。目标跟踪是在目标识别的基础上对一系列包含目标信息的图像进行分析处理从而获得目标运动状态数据,同时对未来短时间内的目标运动状态进行预测。目标识别与跟踪可以为态势估计、火力控制等模块的提供基础信息。
现有的目标识别与跟踪通常是针对单个或几个目标,或者是一类目标。智能火控系统中要实现态势估计、智能决策,目标识别与跟踪需要在短时间内通过快速的智能图像处理,从复杂的场景中寻找出多个多类目标并提取目标特征,并对这些目标进行识别与跟踪,进而提供多个多累目标的固有信息以及运动信息,以保证火控系统对周围环境信息感知的全面性与完整性。
6.3 | 实时全覆盖打击
瞄准系统分为直接瞄准与间接瞄准。直接瞄准是对观瞄设备可直接观察到的目标进行精确快速打击。其打击距离一般为几千米,打击速度快、精确度高,可以对静止和运动的目标实时打击。激光瞄准系统、先进的头盔式瞄准系统等都属于直接瞄准系统。间接瞄准主要针对视线遮挡或目标躲藏于障碍物后的情况下,由前方侦查给出瞄准点,并利用该瞄准点与目标的距离和位置,得出方位角和高低角进行射击。
瞄准主要技术手段包括图像目标识别跟踪与弹道解算。目前,直接瞄准与间接瞄准方式在操作上有较大的差距。实现二者之间的无缝结合将是智能火控系统的关键技术之一。通过信息共享、图像处理等方式,在瞄准器中虚拟呈现视野外的目标,通过后台的快速解算实现实时间接瞄准。根据操作者所选择的目标的不同实现直接瞄准与间接瞄准的自主切换,火炮可以对视野内目标和障碍物之后目标实施快速打击,在保护自己的前提下达到杀伤敌人的目的,增加了机动性与灵活性。
6.4 | 智能信息管理与动态决策
随着战场信息化的逐步建设,战场态势信息逐渐成为透明或半透明状态并可实时共享。坦克单元获取了这些战场态势信息后,需要对信息进行科学合理的应用。显然,长时间综合各方面信息做出快速决策已超出了人的能力范围。因此,有必要构建科学、智能的战场信息管理系统和动态决策系统。
6.5 | 实时通信与网络化信息融合
除了大量的传感器设备,火控系统还集成了各种电子信息系统、武器控制系统、微处理器系统等,为了保证数据的时效性、一致性和准确性,提高系统信息化水平,完成复杂战场环境下的遂行作战任务,对火控群内和火控群间的实时通信能力提出了更高的要求。此外,为了满足联合作战需求,还需要实现本系统与其他战场装备的互联互通。
6.6 | 基于分布式群智能的多智能体的协同与优化
分布式群智能是一种由分布式无智能或简单智能的个体通过任何形式的聚集协同表现出智能行为,为在没有集中控制且不提供全局模型的前提下寻找复杂的分布式问题求解方案提供了基础。它通过一组相互之间可以进行直接通信或者间接通信的简单个体之间的协同合作,可以求解复杂的分布式问题,尤其是大规模的全局优化问题。在网络化火控系统中,作战单体可以视为一种具有简单智能的个体,根据多智能体理论,考虑作战系统的协同作战。
基于网络的抗毁性和生存能力的考虑,把各火控单元看作一个简单智能体,通过对跟踪目标进行航迹融合,可实现各火控单元的群集现象,然后再对群集的火控单元构建火控网中心,并通过上级指挥所实现各火控网中心的互联。
此外,由于地势原因或敌方电磁干扰,火控组网难以建立覆盖全火力单元的通信网络,此时每个火控单元仅能跟相邻的火控单元进行通信,这样就近似于一个通信拓扑受约束下的多智能体问题。如何在这种情况下利用多智能体协同与优化完成对目标的跟踪以及航迹融合,也是需要考虑的重点问题。
参考资料:
[1] 枪械瞄准镜是如何诞生的?今后朝哪个方向发展?- 知乎 (zhihu.com)
[2] 准直光学瞄准镜原理介绍 ——〖枪炮世界〗 (pewpewpew.work)
[3] (15 封私信 / 80 条消息) 红点式瞄准镜、反射式瞄准镜、全息瞄准镜、激光瞄准镜、光学瞄准镜等分别都是什么?各有什么优缺点?- 知乎 (zhihu.com)
[4] 评测:艾睿FASTFAL19红外瞄准镜 中国“热融合”技术征服美国专家 (baidu.com)
[5] Home - smart-shooter
[6] SMASH 2000:突击步枪攻击无人机,美国海军陆战队的新装备 - 知乎 (zhihu.com)
[7] 美国官商催生的步枪项目——陆军“下一代班组武器”(NGSW)计划前世今生- 知乎 (zhihu.com)
[8] 瞄准镜行业分析-预计2028年市场规模将达到67.42亿美元 - 知乎 (zhihu.com)
[9] Largest militaries in the world 2024 | Statista
[10] 长江证券 《睿创微纳-688002-非制冷红外龙头,军民赛道高景气成长》
[11] 干货警告!国内枪械科研人员详细讲解XM157火控系统!(qq.com)
[12] 可曾听闻XM157?瞄准镜中的天花板,真正的瞄哪打哪!(qq.com)
[13] 邓方 《智能火控及其关键技术》


财经自媒体联盟













































 第一财经日报
第一财经日报  每日经济新闻
每日经济新闻  贝壳财经视频
贝壳财经视频  尺度商业
尺度商业  财联社APP
财联社APP  量子位
量子位  财经网
财经网  华商韬略
华商韬略 
4000520066 欢迎批评指正
All Rights Reserved 新浪公司 版权所有
